Letze Aktualisierung: 19.11.2022
Die Aufgabenstellung ist auch als .PDF verfügbar:
Download Workshop 2 (.pdf, 1 MB)
Inhalte des Workshops
- Verbauen und Kennenlernen der Sensoren des EV3 Systems
- Programmierkenntnisse
- Auslesen von Sensor-Werten
- Bedingungen – Reagieren auf Sensor-Werte
- Wiederholung Schleifen
Aufgaben
Aufgabe 1: Berührungssensor
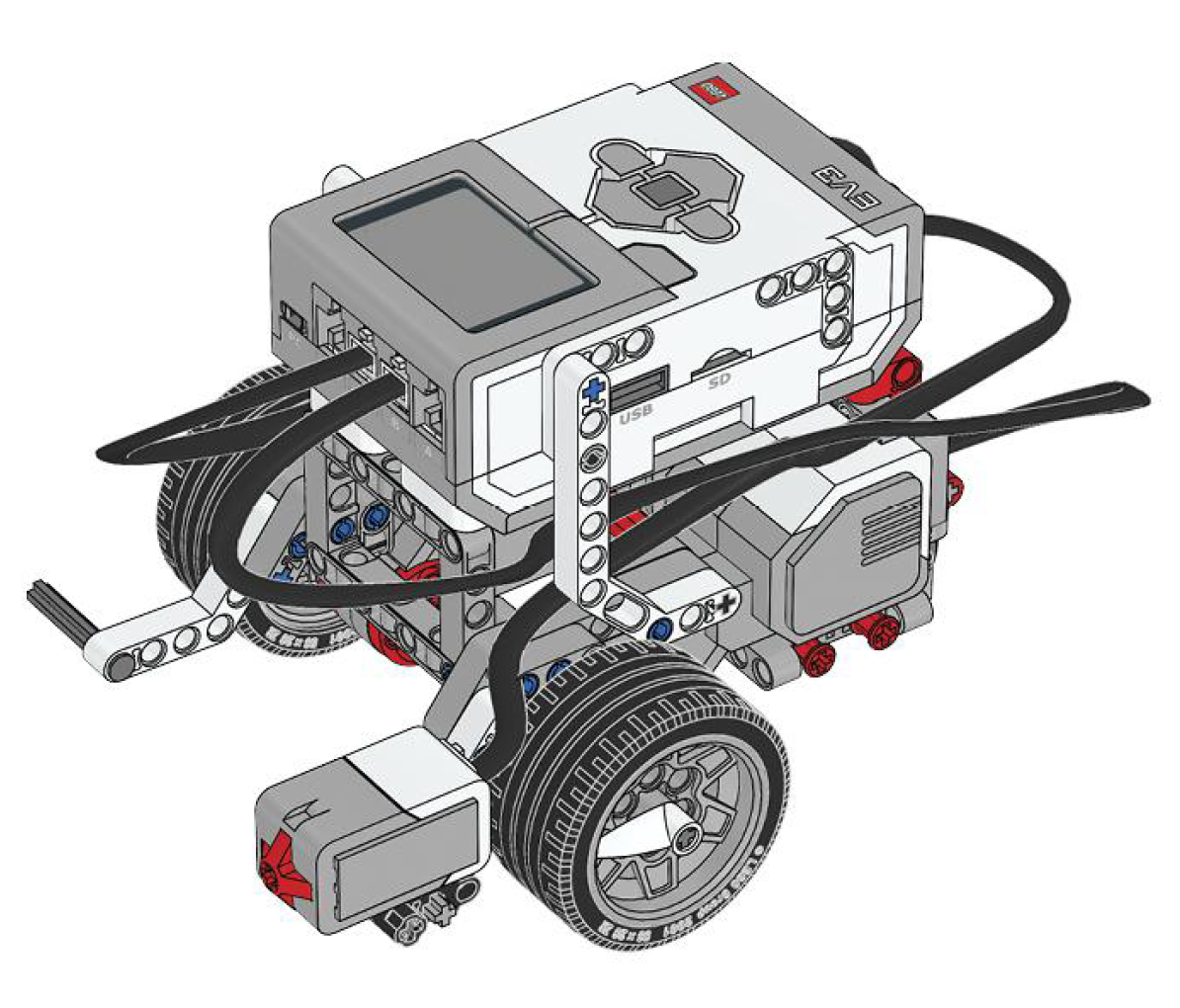
Baue den Berührungssensor-Aufsatz (Bauanleitung Seite 73–76, Online PDF bis Seite 63–67)
Download Bauanleitung
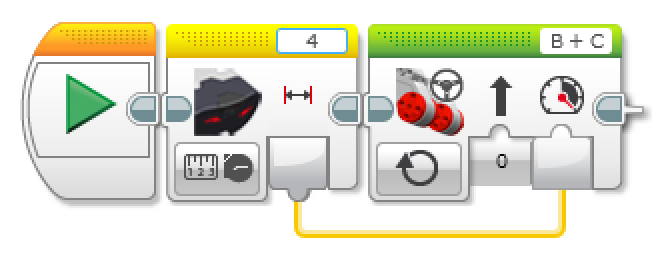
Aufgabe 1.a: Schalter – Reagieren auf eine Startbedingung
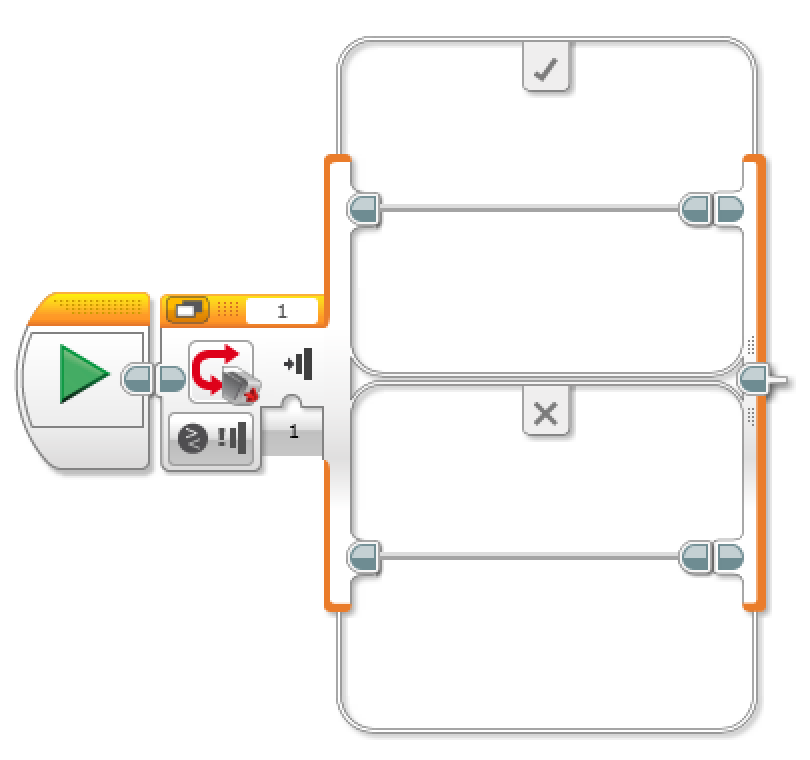
- Ist der Berührungssensor beim Start des Programms gedrückt, so soll der Roboter 3 Sekunden vorwärts fahren, sonst 3 Sekunden rückwärts. Anschließend soll der Roboter stehen bleiben.
Tipp: Mit einem Schalter kannst du auf verschiedene Sensor-Werte reagieren.
|
|
|
Aufgabe 1.b: Schalter – Kontinuierliche Überprüfung von Sensoren
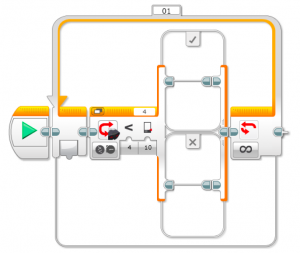
- Immer, wenn der Berührungssensor gedrückt ist, so soll die Statusleuchte rot aufleuchten. Ist der Berührungssensor nicht gedrückt, so soll die Statusleuchte nicht leuchten.
Tipp: Verwende eine Schleife, damit der Roboter eine Aufgabe laufend erfüllen kann.
Aufgabe 2: Ultraschallsensor
Falls nicht vorhanden, lade den Ultraschallsensor-Block hier herunter.
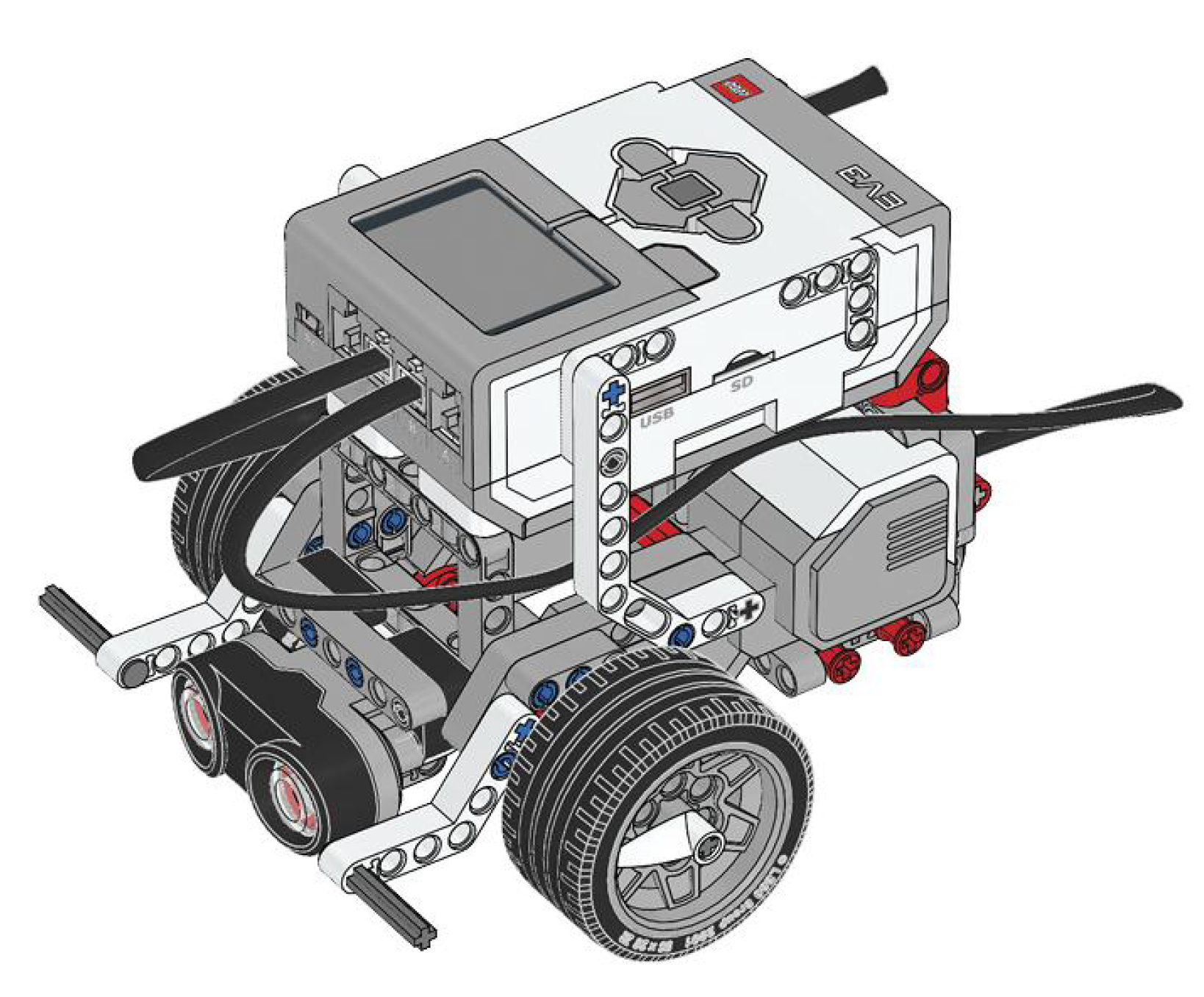
Baue den Ultraschallsensor-Aufsatz (Bauanleitung Seite 42–47, Online PDF bis Seite 68–76).
- Der Roboter fährt solange vorwärts, bis er ein Hindernis in weniger als 10cm Entfernung erkennt und bleibt dann stehen. Sobald das Hindernis weg ist, soll der Roboter weiterfahren, bis wieder ein Hindernis erkannt wird.
- Zusatz Der Roboter fährt bis auf 10 cm an ein Hindernis heran, fährt im Anschluss um 30 cm zurück, dreht um 45 Grad und beginnt dann von neuem.
- Zusatz Verschachtelte Bedingung – Der Roboter fährt bis auf 50 cm an ein Hindernis heran und wird dann mit abnehmender Distanz langsamer. Sobald der Berührungssensor aktiv wird, soll der Roboter sofort stehen bleiben.
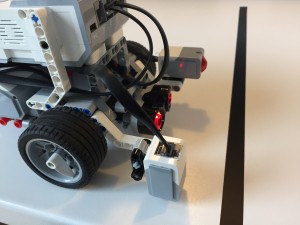
Aufgabe 3: Farbsensor
Baue den Farbsensor-Aufsatz (Bauanleitung Seite 69–76, Online PDF bis Seite 60–66).
Aufgabe 3.a: Farbe erkenne
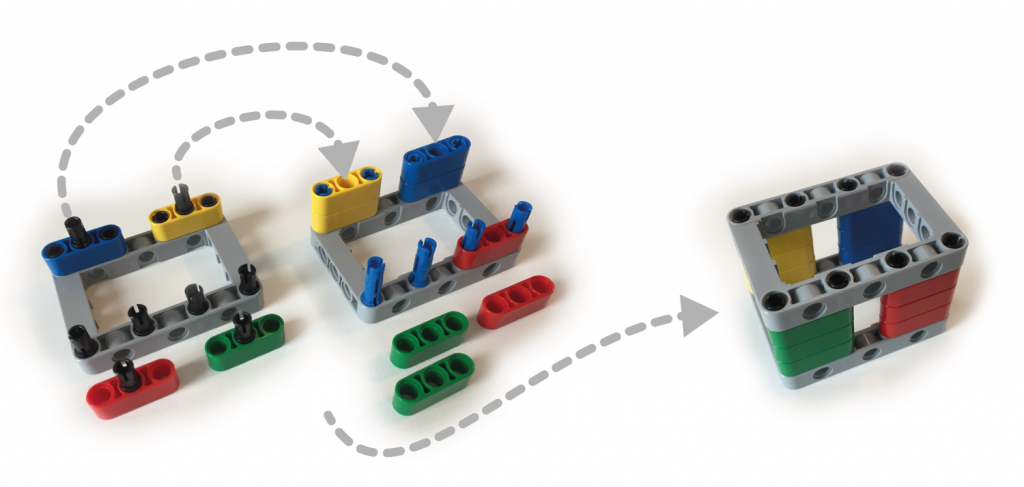
Baue den Farbwürfel (Bauanleitung Seite 4–6)
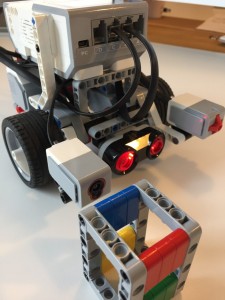
- Halte den Würfel vor den Farbsensor und gib die Farbe als Text am Bildschirm aus.
Tipp: Du kannst innerhalb eines Schalters einen weiteren Schalter verwenden..
- Zusatz Wird eine rote, eine gelbe oder eine grüne Farbe erkannt, so soll zusätzlich die entsprechende Statusleuchte leuchten (rot-rot, gelb-gelb, grün-grün). Wir keine Farbe erkannt, so soll die Statusleuchte nicht leuchten.
Aufgabe 3.b: Farbe als Stopp-Linie
- Zusatz Suche einen schwarzen flachen Gegenstand oder schwarzes Papier, welchen/welches du als Stopp-Linie verwenden willst.
Baue den Farbsensoraufsatz so um, dass der Sensor nach unten misst und etwa 5-10mm vom Boden entfernt ist. Der Roboter soll jetzt solange fahren, bis die Stopp-Linie erreicht ist und anschließend stehen bleiben.
- Zusatz Verwende statt dem Farbvergleich den Vergleich des reflektierenden Lichts.
Aufgabe 4: Kombinationen
- Zusatz Der Roboter soll jetzt auf alle drei Sensoren gleichzeitig entsprechend folgendem Pseudo- Quelltext reagieren:
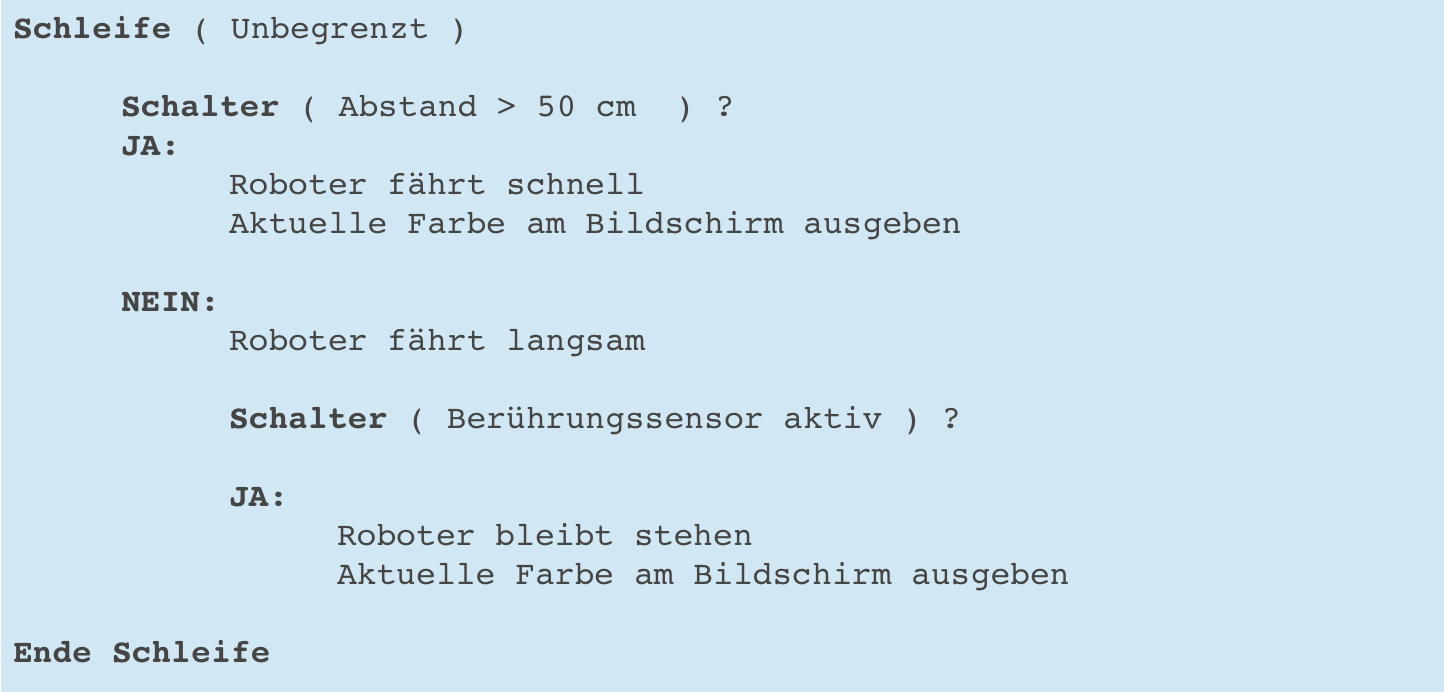
- Zusatz Denke dir weitere Aufgaben aus, die der Roboter erfüllen soll und setze diese um.